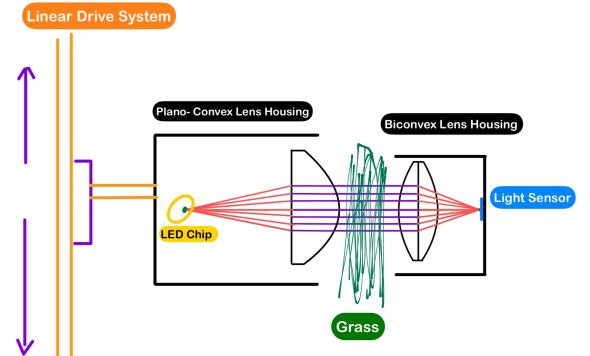
A novel optical sensor on an autonomous robot provides continuous, density‑aware pasture height measurements, validated with strong agreement to standard methods.
Continue reading …
A novel optical sensor on an autonomous robot provides continuous, density‑aware pasture height measurements, validated with strong agreement to standard methods.
A digital twin coupled with a mobile field robot enables precise planning and semi-autonomous operations on digital pastures, integrating GIS data, real-time sensing and 3-D simulation for improved grazing management.
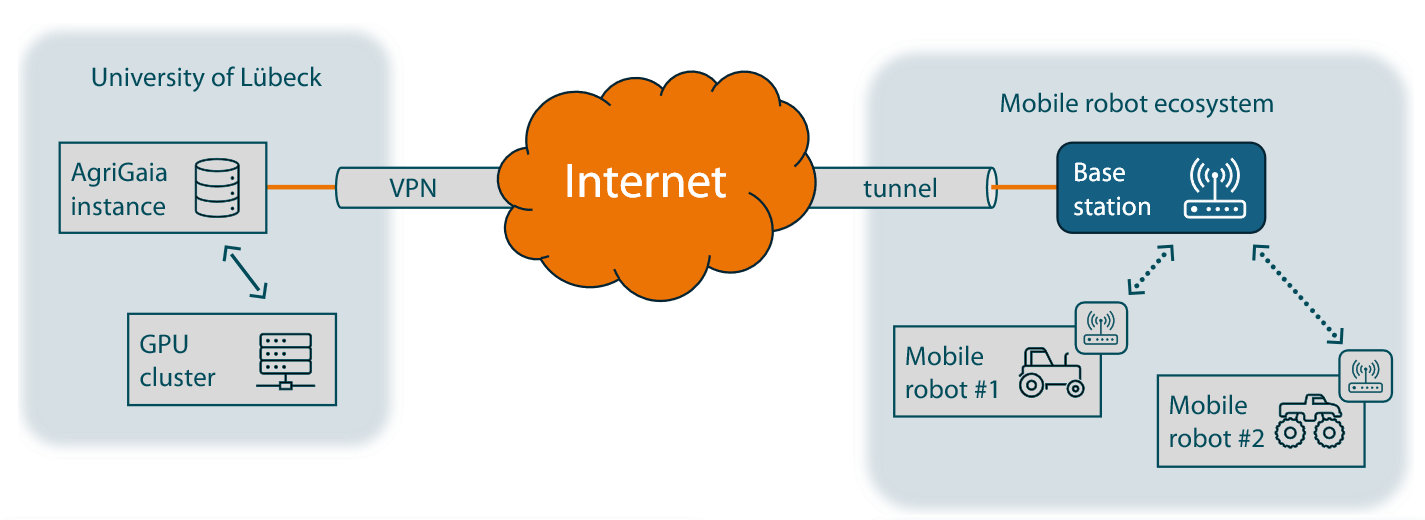
A new study demonstrates containerised AI deployment on mobile agricultural robots using the AgriGaia platform, offering reproducible weed detection, modular workflows and remote management, advancing precision farming and collaborative research across institutions.
Exploring Innovation in Weed Control: Autonomous Mapping and Monitoring of Rumex at CODIT 2024 This year’s CODIT (Control, Decision and Information Technologies) conference, held in the beautiful Mediterranean island of Malta, witnessed many fascinating research[…]
Our team member Ngoc Thinh Nguyen travelled to Japan to present new results about our project at this year’s prestigious ICRA conference. Navigating through agricultural fields presents unique challenges that demand exceptional manoeuvrability. One promising[…]
Im Rahmen der X-KIT Abschlussveranstaltung 2024 haben sich alle vom BMEL in den Jahren 2020-2024 geförderten Projekte vorgestellt. KRIBL ist eines der Projekte. Der Vortrag ist als Video online verfügbar.
Today, we’re thrilled to announce that an innovative paper from the minds of Ngoc Thinh Nguyen and Pranav Tej Gangavarapu was accepted for publication at ICRA 2024. It’s title is “Motion planning for 4WS vehicle[…]
The KRIBL project in general focuses on creating a robot platform for various agricultural applications, including autonomous monitoring of segetal flora, protection against birds of prey in poultry farming, and generic robot behavior for precision[…]
In an exciting collaboration between academia and industry, a custom-built autonomous research platform is poised to revolutionize the realm of small-scale agriculture. Meticulously designed to cater specifically to the needs of smaller biological enterprises without[…]
We today had a short field trip to our partner, Thünen-Institute in Trenthorst, to familiarize ourselves with different types of plate meters for measuring grass height on pastures. First steps towards integrating this with our[…]