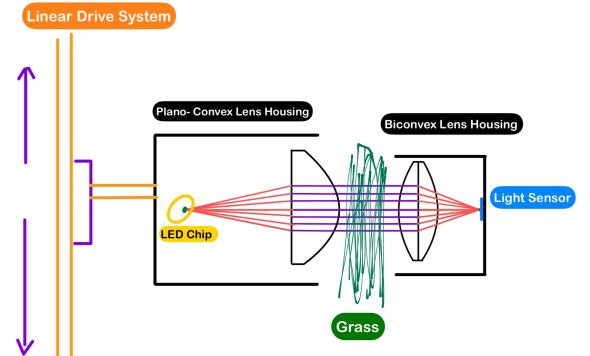
A novel optical sensor on an autonomous robot provides continuous, density‑aware pasture height measurements, validated with strong agreement to standard methods.
Continue reading …
A novel optical sensor on an autonomous robot provides continuous, density‑aware pasture height measurements, validated with strong agreement to standard methods.
A digital twin coupled with a mobile field robot enables precise planning and semi-autonomous operations on digital pastures, integrating GIS data, real-time sensing and 3-D simulation for improved grazing management.
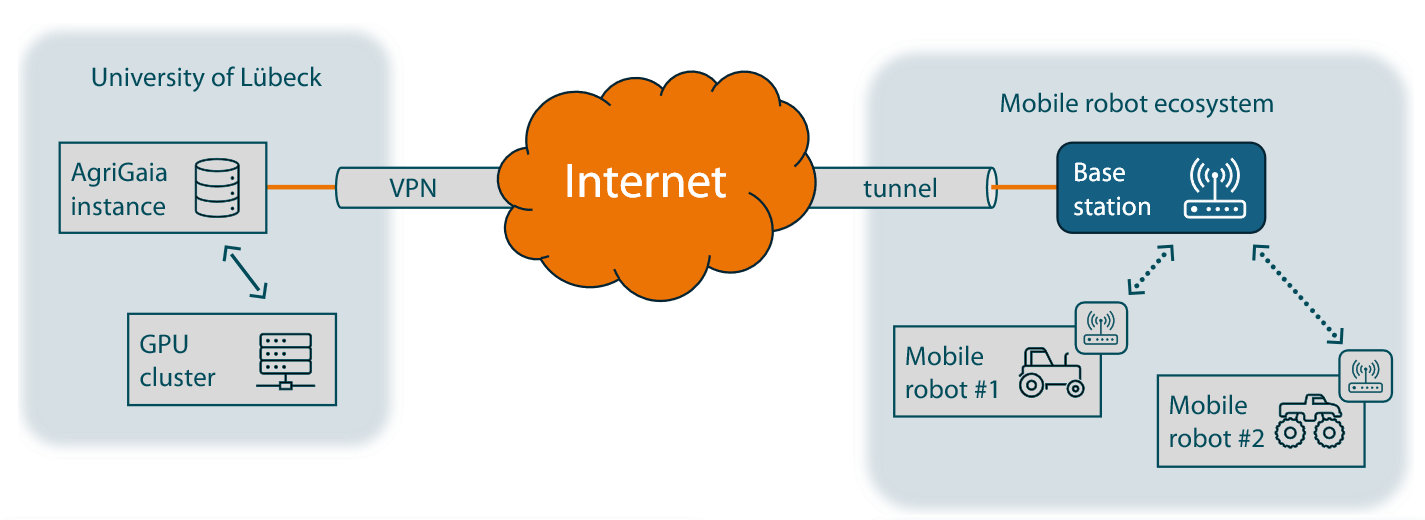
A new study demonstrates containerised AI deployment on mobile agricultural robots using the AgriGaia platform, offering reproducible weed detection, modular workflows and remote management, advancing precision farming and collaborative research across institutions.
Der NDR hat uns beim Testen unserer Roboter auf unserem Partnerbetrieb, dem Gut Rothenhausen (https://www.gutrothenhausen.de/), mit der Kamera begleitet und einen Video-Beitrag (https://www.ndr.de/nachrichten/schleswig-holstein/landwirtschaft-wenn-roboter-die-feldarbeit-machen,roboter-202.html) erstellt, der sowohl Online als auch im Schleswig-Holstein Magazin am 19.07.2025 erschienen[…]
Die Fehmarnbelt Days 2025 (https://www.luebeck-tourismus.de/kultur/fehmarnbeltdays) fanden vom 14.-16. Juni in Lübeck statt. Das Institut für Robotik und Kognitive Systeme der Universität zu Lübeck hat das EIP Projekt “Robotik auf der digitalen Weide” auf dem Stand[…]
In Glückstadt konnte Dr. Volker Saggau am 11.06.2025 im Rahmen der Zukunftswerkstatt Agrobusiness einen Ausblick geben, wie sich die Landwirtschaft technologisch entwickeln könnte. Der Vortrag “KI und Robotik in der Landwirtschaft im Einsatz – wohin[…]
Dr. Volker Saggau hat auf der 75. Öffentlichen Hochschultagung “Vom Wunsch zur Wirklichkeit: Agrar- und Ernährungssysteme der Zukunft” am 27. Februar 2025 in Kiel teilgenommen (programm-2025). Die von der Agrar- und Ernährungswissenschaftlichen Fakultät der Christian-Albrechts-Universität[…]
Die KIDA-KON 2024 fand vom 02. – 03. Dezember in Leipzig statt (Reader_KIDA2024_Layout version 241113.pdf). Das Vorhaben KIDA (KI- und Daten-Akzelerator) hat diese Konferenz erfolgreich ausgerichtet. Moritz Gerwin hat an der KIDA-KON 2024 mit einem[…]
Integrating Moving Objects into Online-SLAM: Introducing KISS (Keep it Static SLAMMOT) TL;DR Full Text We’re excited to share our latest research on a critical challenge in contemporary robotics—handling moving objects in Simultaneous Localization and Mapping[…]
Exploring Innovation in Weed Control: Autonomous Mapping and Monitoring of Rumex at CODIT 2024 This year’s CODIT (Control, Decision and Information Technologies) conference, held in the beautiful Mediterranean island of Malta, witnessed many fascinating research[…]